Model Predictive Control Method for Autonomous Vehicles using Time-Varying and Non-uniformly Spaced Horizon, IEEE ACCESS,2021)
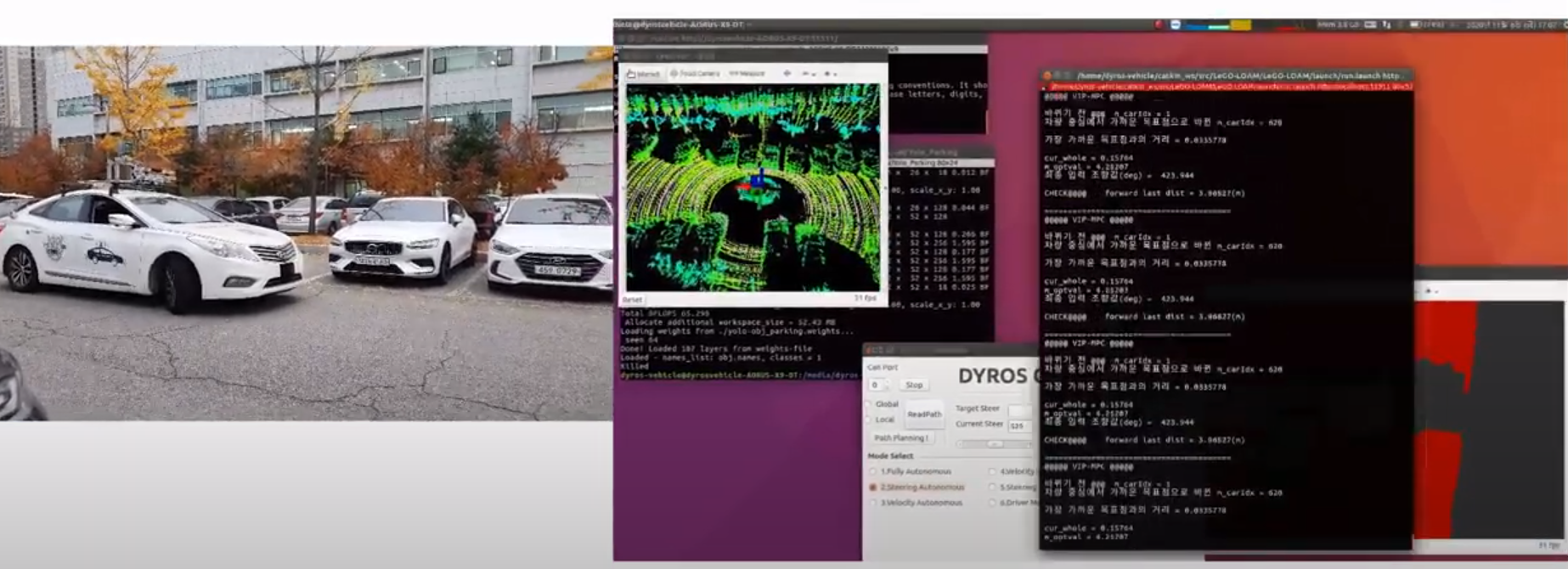
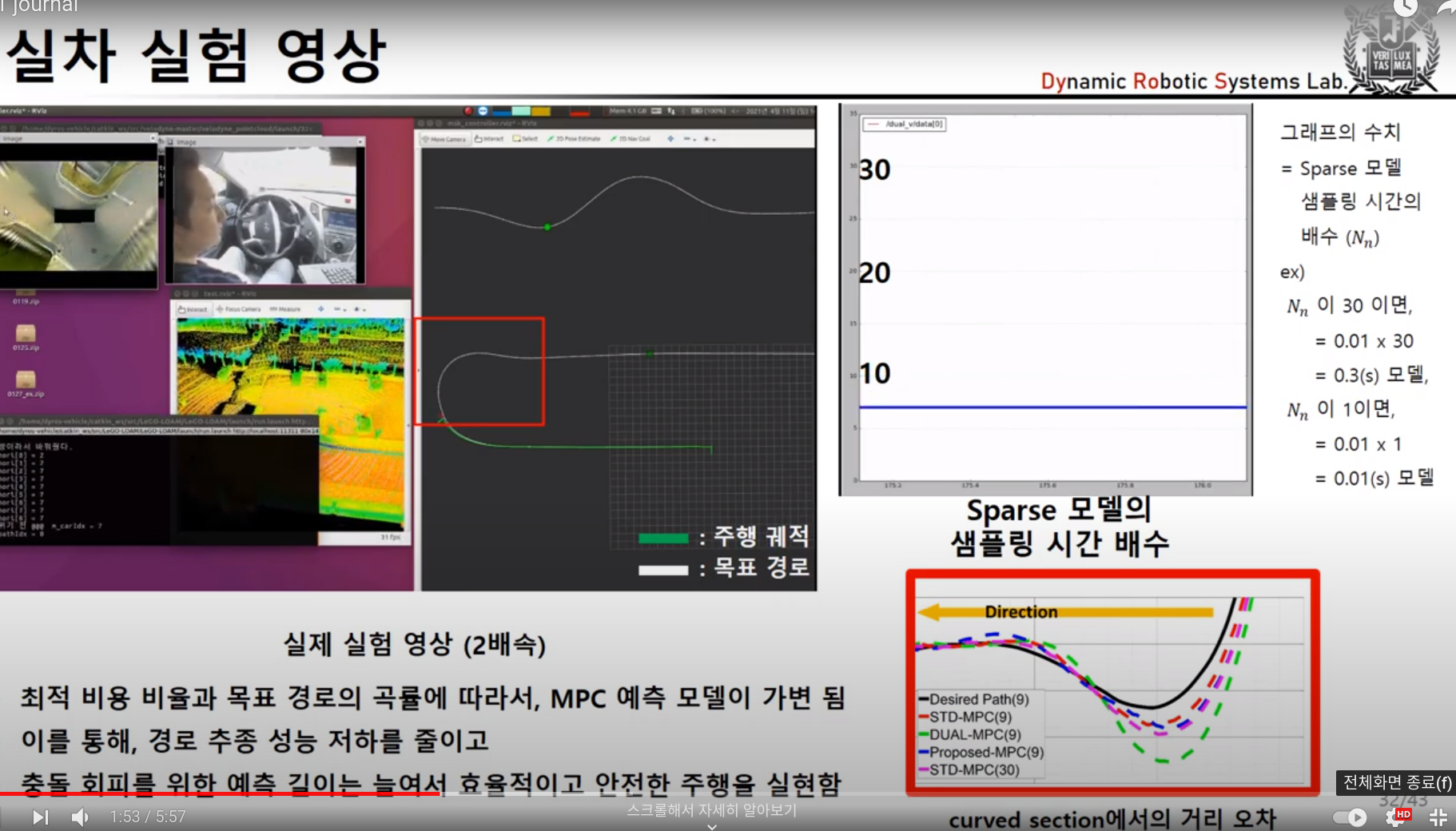
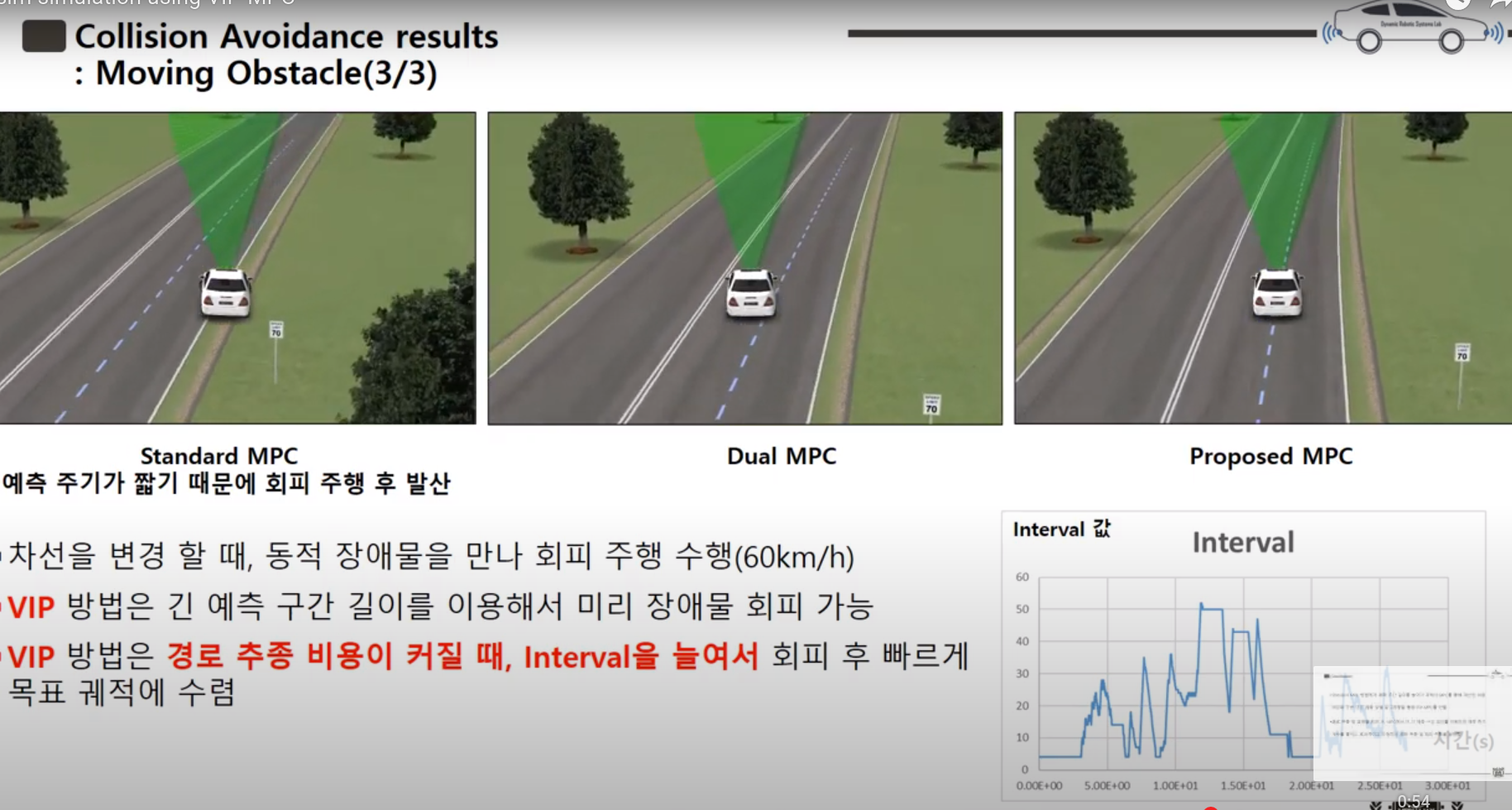
In this study, a path-following and obstacle-avoidance algorithm was proposed for an autonomous vehicle that varied sampling time of the MPC prediction model. The path-following and collision avoidance performances were evaluated using both the CARLA simulator and a real vehicle.